Robot de gestión de Arduino en Bluetooth. La máquina con control de bluetooth proporcional desde debajo de Android. Trabajando con la aplicación de Android
Destornillador recargable: un excelente asistente en la granja. La herramienta junto con el maestro trabaja en la casa y en el jardín, trabaja en el garaje o en el campo. Mientras ve la batería. El número de ciclos de carga-descarga en la batería es limitada, la batería se echa a perder y de la ociosidad: la autocarcación destruye los elementos. En promedio, la batería vive 3 años, después de lo cual tiene que ser reemplazado. Puede guardar la herramienta convirtiéndola a la red. La alteración se realiza de diferentes maneras.
¿Es posible rehacerlo?
Sin baterías, el destornillador se convierte en una pieza de hierro. Cuando las baterías dejan de mantener la carga, debe buscar nuevas baterías. Primero, es caro: el precio de las baterías es de hasta el 80% del valor del destornillador, es más eficiente comprar una nueva herramienta. En segundo lugar, las baterías no siempre están a la venta, por ejemplo, si el modelo se elimina de la producción. En tercer lugar, un propietario de un indigrante busca utilizar todas las posibilidades de ahorrar fondos.
Alteración del destornillador recargable para el trabajo de red eléctrica - apagado. ¿Qué da?
- La herramienta obtiene una nueva vida.
- Ya no necesitaban baterías que requieren carga.
- El par de la herramienta no depende de la carga de la batería.
La desventaja del diseño construido es la dependencia del zócalo y la longitud del cable de red.
¡Atención! Trabaja a una altitud superior a dos metros, no se permite el destornillador reelaborado.
Cómo rehacer el destornillador recargable para trabajar desde 220 voltios
Los maestros se les ocurrió varias maneras de rehacer el destornillador para trabajar desde la red eléctrica. Todos ellos deben proporcionar al motor la tensión de suministro requerida utilizando una fuente o convertidor intermedia.
Tabla: Opciones de alimentación para destornillador de red
| Fuente de alimentación | Dignidad | desventajas |
| Destornillador de cargador completo. |
| El cargador tiene lugar en la mesa. |
| La fuente de alimentación terminada, colocada en el cuerpo de la batería vieja. |
|
|
| La fuente de alimentación casera, colocada en el cuerpo de la batería vieja. |
|
|
| Fuente de alimentación externa | Alteración no plana. |
|
| Fuente de alimentación de la computadora |
|
|
Conexión del destornillador al cargador
¡Atención! Con un bajo voltaje, la pérdida en el cable es grande, por lo que el cable entre el cargador y la herramienta no debe tener más 1 metro, sección transversal de al menos 2.5 metros cuadrados. mm.
Secuenciación:
- Desmonte la batería vieja y retire los elementos sentados de él.
- Taladre un orificio de cable en la carcasa de la batería, para girar el cable en el orificio. Es recomendable compactar la conexión con una cinta o un tubo retráctil para que el cable no se salga de la caja.
- Elementos eliminados de la batería destornillada violada: la mano estará cansada. Para restaurar el equilibrio, el cuerpo debe colocarse en el cuerpo: puede ser un árbol denso o un trozo de goma.
- CAMBIO DE CAMBIO A TERMINALES batería anteriorConectado al destornillador.
- Recoge la caja de la batería.
- Izquierda para experimentar una herramienta actualizada en el trabajo.
Envío o fijación de los clips "cocodrilo" a los terminales del cargador dos cables.
Instalación de la fuente de alimentación terminada en la caja anterior de la batería.
¡Atención! En el caso cerrado, la fuente de alimentación está mal enfriada. Se recomienda hacer agujeros en las paredes del caso. No trabaje la herramienta sin un descanso durante más de 15 minutos.
Procedimiento:
- Desmonte la batería vieja y elimine los elementos que no funcionan.
- Instale la fuente de alimentación en la caja de la batería. Conecte los contactos de alto voltaje y los terminales de bajo voltaje.
- Recoger y cerrar la caja de la batería.
- Instale la batería en destornillador.
- Encienda el enchufe de la fuente de alimentación en el zócalo y verifique la herramienta de red actualizada en funcionamiento.
Fuente de alimentación casera
¡Atención! Observe las reglas de seguridad eléctrica. Salta y conecte durante un dispositivo desenergizado.
Instrucción paso a paso:
- Desmonte el cuerpo de la batería vieja, retire las protuberancias de él.
- Instale los elementos de la unidad de fuente de alimentación eléctrica en la placa de circuito, los contactos de soldadura.
- Instale la tarifa recolectada en el caso. Compruebe el probador la presencia de voltaje en la salida.
Fuente de alimentación en el caso.
- Conecte los cables de bajo voltaje a los terminales de la batería vieja. Recoge el casco.
Solo será para recoger la caja de la batería.
Conecte el destornillador a la red eléctrica y compruebe.
Video: Batería de litio casera para destornillador.
Conectar a la fuente de alimentación externa
¡Atención! En el proceso de refinamiento, deberá desmontar la carcasa del destornillador e intervenir en el circuito eléctrico. Recuerde la secuencia de desmontaje para recopilar todas las partes en la secuencia inversa.
Qué hacer:

Conexión a una unidad de fuente de alimentación
Instrucción:
- Busque o compre una fuente de alimentación de una computadora, con una capacidad de al menos 300 W.
- Desmonte la carcasa del destornillador. Encuentra dentro de la fuente de alimentación del motor. Habla con conectores de alambre para bloque de computadora Nutrición.
- Mostrar conexiones desde la carcasa para conectar una unidad de suministro de energía.
- Conecte el destornillador a una nueva fuente de alimentación.
- Encienda la fuente de alimentación a la red y verifique la operación del dispositivo.
Video: Fuente de alimentación para destornillador de la computadora BP
Cómo alimentar el destornillador, conservando su autonomía.
Si el asistente funciona en el edificio al que no se suministra electricidad, y las baterías se han echado a perder, hay formas de alimentar el destornillador:
- reemplace los bancos antiguos de las baterías al nuevo;
- conecte el destornillador a la batería del automóvil;
- conecte la herramienta a otra batería, por ejemplo, tomada de la fuente de alimentación ininterrumpida.
Reemplazo de elementos viejos
¡Atención! Reemplazo de las baterías, preste atención a la polaridad correcta de los elementos de conexión.
Procedimiento:

¡Atención! Cargada Una batería transmitida sigue solo un cargador especialmente seleccionado.
Conectar a una batería externa
Secuenciación:
- Comprar o encontrar batería externaPor ejemplo, tomar de una fuente de alimentación ininterrumpida innecesaria.
- Tome un cable con una sección transversal de al menos 2.5 metros cuadrados. mm. Retire el aislamiento e instale los terminales de sujeción en los extremos de cobre adecuados para montar en la batería.
- El segundo extremo del cable se coloca en el cuerpo de la batería vieja y la soldadura a los terminales insertados en el destornillador.
- Inserte la caja de la batería en el destornillador, conecte los terminales del cable a la batería.
- Pruebe una herramienta restaurada en el trabajo.
La herramienta recargable eléctrica sirve varias veces más larga que la alimentación de la batería. Eliminar el destornillador con elementos inadecuados, es irrazonable. Este propietario podrá reparar el dispositivo moviéndolo a otra fuente de energía, lo que le otorga una nueva vida.
Cuando las baterías dejan de funcionar, muchas se preguntan cómo puede rehacer el destornillador de la batería en la red. Reparar baterías con elementos destruidos es imposible. El costo de las nuevas fuentes de alimentos es casi igual al precio de un destornillador. Encontrar artículos adecuados no siempre es posible, los modelos a menudo se eliminan de la producción. Pero para la maternidad y los expertos hábiles hay una salida, para poder alimentar el destornillador de la red.
Destornillador de nutrición de red - 2 opciones principales
La desventaja de la herramienta convertida es una: está atada a la salida. Pero para trabajar en la habitación no es tan importante. Pero más ventajas. Ahora no tiene que cuidar la recarga de la batería, no habrá tiempo de inactividad en el trabajo. La resistencia de la corriente permanece estable y no depende de la descarga de la batería, lo que significa la constancia del par.
Antes de buscar la fuente de alimentación (más - BP), lea los parámetros del destornillador que se enumeran en el caso o en el pasaporte. Preste atención al voltaje. Una herramienta de 12 voltios es más común, la fuente de alimentación no será difícil encontrarla. Si el voltaje es más, la búsqueda se puede retrasar. Se requiere que descubra la corriente consumida, que no se especifica en las especificaciones técnicas. La unidad comprada debe producir el valor de corriente promedio (entre la capacidad de la batería y el cargador estándar). Los datos se pueden encontrar a partir de la marca.
Hay dos variantes principales de un destornillador recargable de 220 voltios. El primero es usar BP externo. Cualquier rectificador es adecuado, capaz de emitir el voltaje constante necesario. Incluso si él es grande y voluminoso, no hay problema. Después de todo, no tiene que usar la habitación. El bloque se instala cerca del zócalo, y el cable a la herramienta realiza la longitud requerida.

Recuerde que con una disminución en el voltaje aumenta la resistencia de la corriente si la energía permanece sin cambios. Esto significa que la sección transversal del cable de bajo voltaje debe ser mayor que desde la red de 220 V.
La segunda opción radica en el hecho de que el BP se monta en la carcasa de la batería. El único obstáculo al elegir tal método puede ser el tamaño del transformador. Se guarda la movilidad, el radio de uso depende de la longitud del cable de red. Es importante recordar que se suministra una fuente de alimentación de 220 V a la herramienta, por lo que el cable debe ser confiable, y la entrada en sí está cuidadosamente, atraída cuidadosamente.
¿Qué bloques externos se pueden usar: una computadora antigua o carga de una computadora portátil?
Como fuente externa, puede utilizar fuentes de alimentación asequibles:
- cargador para baterías automotrices;
- BP de la computadora vieja;
- cargando de una computadora portátil;
- hecho en casa BP.

En el mercado puedes comprar un viejo cargador. Ahora, los cargadores de impulsos se utilizan principalmente, y los dispositivos antiguos a menudo se venden como innecesarios. Es un cargador de este tipo con la posibilidad de ajuste de voltaje manual y la corriente es ideal para cualquier destornillador, independientemente de su voltaje de operación. Toda la alteración radica en la conexión de un cable de bajo voltaje a los contactos de salida del cargador.
La fuente de alimentación de la computadora se compra en modelos antiguos, debe haber un botón de apagado. No lo necesitará, pero esta es exactamente la opción del formato "AT", que se necesita. Se selecciona un bloque de 300-350 vatios en la máquina de radio, que garantizará un funcionamiento confiable de los destornilladores de baja potencia y mediano. Todo especificaciones Especificado en la etiqueta en la carcasa. El bloque tiene un ventilador de refrigeración y protección contra sobrecargas. Para rehacer la computadora BP con sus propias manos en un externo para un destornillador, realice operaciones simples:
- desmontar la carcasa;
- en un conector cuadrado grande, encontramos un alambre verde y cualquier negro;
- ambos cables se conectan, están aislados;
- en otro conector más pequeño, eliminamos todos los cables, dejando amarillo y negro;
- ellos soldaron cable de cable.
Para cumplir con la polaridad, debe saber: el alambre amarillo - el positivo, negro - menos . Una herramienta con voltaje de hasta 14 voltios se está ejecutando desde una unidad de suministro de energía.
La mayoría cargador Desde la computadora portátil, tienen características que les permiten usarlas como la fuente de alimentación del destornillador. Cargado con voltaje de salida de 12-19 voltios. Los únicos cambios que deberán realizarse están relacionados con el enchufe de salida. Debe cortarse, limpiar los cables y soldar el cable de la longitud deseada.
Las personas que tienen una idea de ingeniería eléctrica pueden hacer una fuente de alimentación casera. El esquema es bastante simple e incluye un transformador de bajada, un rectificador de diodo y dos condensadores. Todos los artículos pueden ser comprados o toman de la antigua ingeniería de radio. Un transformador es adecuado a partir de un TV de tubo con un rendimiento de 24-30 V. Se requiere la presencia de alisado Puente de diodo. Los condensadores aplican DEFFFFICER, desde la tecnología antigua: uno por 0.1 μf y otro electrolítico a 4700 μf.

¡Atención! El diseño debe incluirse en la carcasa. Para protegerse contra el cortocircuito, se requieren los fusibles en la entrada y la salida.
Cómo colocar BP en el caso - 3 características diferentes
La red se puede colocar en la caja de la batería o en la manija. Posibles opciones:
- cualquier adecuado en las características y tamaño de BP;
- bP chino en 24 v;
- hecho en casa.
En el iniciador de radio se selecciona con los parámetros necesarios. En casa, debe retirarse cuidadosamente de la carcasa y colocar su destornillador, asegurando con seguridad todos los componentes. Si los cables son cortos, los alargan para que no toquen las piezas metálicas. Transformador y tarifa de lugar por separado. En los microcircuitos para un mejor enfriamiento, instale radiadores adicionales. Además, no hay agujeros adicionales en la carcasa para circular aire, y el calor se tomó al trabajar.

En la tienda de componentes de radio, compramos BP en 24 V, actual 9 A. Los destornilladores operan de 12 o 18 voltios, por lo tanto, vale la pena una tarea de reducción de estrés en el nivel requerido. Para lograr dicho trabajo, se requiere el conocimiento mínimo de la ingeniería de radio. El voltaje de salida es compatible con una resistencia R10 con una calificación de 2320 ohmios. En su lugar, es necesario instalar una resistencia de accidente cerebrovascular en 10 com. Cómo hacer que la configuración de la fuente de alimentación se le presente:
- caer una resistencia constante;
- establezca la resistencia a la resistencia de la resistencia rápida de 2300 ohmios;
- resistor de tiras para entrar en el lugar de permanente;
- cuando se enciende el BP, ajuste el voltaje.
El diseño del BP casero mentirá. transformador electrónico Feron o Taschibra.por 60 vatios Se pueden comprar en la tienda de productos eléctricos, están diseñados para lámparas halógenas. No requieren alteraciones. La eliminación del devanado secundario desde el punto promedio nos permitió aplicar dos diodos Schottky en lugar de los cuatro habituales. El trabajo de BP está controlado por el LED HL1. El diagrama muestra todos los detalles necesarios.

El transformador T1 está solo en la herida. Se usa un anillo de ferrita apropiado NM2000 con un tamaño de 28 × 16 × 9. Antes de enrollar el supfil, los ángulos se limpian, el anillo se envuelve con una cinta de fumación. El bloque hecho se monta en una placa de aluminio con un espesor de 3 mm y se coloca más en la caja de la batería. También realiza la función del cable general.
Cómo cumplir con la instalación - ¿Necesita los contrapesos?
La confiabilidad en la operación y la seguridad depende de la fiabilidad de la parte eléctrica. Como red y bajo voltaje, se utiliza un cable de corte suave. Si el dispositivo es externo, los extremos del cable deben estar conectados a sus salidas. El cableado de cobre y los contactos de latón están mecanizando con ácido de soldadura, después de lo cual se soldan fácilmente. En la práctica, a menudo se usan abrazaderas especiales: "cocodrilos". En el propio destornillador, sin soldadura, no lo hacen, "los cocodrilos" se mantienen tanto para que los contactos no se desconectan durante la operación.

La opción perfecta es usar el cuerpo de la batería vieja. Es desmontado y eliminado todo el interior. Al mismo tiempo, se distinguen las sustancias nocivas, debe encargarse de la protección del tracto respiratorio y la piel. La carcasa se lava con solución de soda, agua corriente y seca. Desde el interior de los contactos, vendieron los extremos del cable en cumplimiento de la polaridad. Para no adivinar, conecte temporalmente el cable, encienda el destornillador y mira a qué lado se pega el husillo, los cables están etiquetados. En la parte inferior del caso hacemos un agujero, saltamos los cables. Dentro de la caja, el cable debe estar seguro, enrolle una cinta aislante. Tal engrosamiento no le dará al cableado para estirarse y romperse. Luego los extremos soldar a los contactos.
Dentro de la caja de contrapesos. Mejor material Habrá caucho extruido. Tiene las características necesarias: alta densidad, propiedades aislantes. Para que los neumáticos no salgan adentro, córtelos con un poco travieso. Para colocar contrapesos en el estuche, el material es un poco flexionado y lo pone de modo que no fluctúe y sirva como un aislamiento adicional. Tal vez alguien contrapeso parece ser superfluo, pero no lo es. El diseño del destornillador proporciona que el centro de gravedad está en el asa. Carga la mano, pero descarga un cepillo. Cuando las baterías se retiran de la carcasa, el centro de gravedad se desplaza, aumenta la carga en el cepillo. El trabajo se vuelve incómodo y duro. El contrapeso casero restaura el centro de gravedad cerca de la fábrica.
Cómo usar un destornillador de red - reglas simples
Has visto lo fácil que es rehacer el destornillador de la batería en la red. La práctica de los artesanos sugirió simple y aviso util Operando:
- después de 20 minutos de trabajo, se deben dar unas vacaciones de cinco minutos;
- cable eléctrico fijo a mano para que no interfiera con el trabajo;
- la fuente de alimentación debe cepillarse regularmente del polvo;
- no utilice cables de extensión para incluir BP en la red;
- BP necesariamente molido;
- en las obras de gran altitud de los destornilladores de red, está prohibido.
El cumplimiento de estas reglas extenderá la vida útil de una herramienta actualizada. La movilidad perdió un poco, pero la unidad no requiere recarga, funciona sin problemas y con confianza.
En el artículo, considere la conexión y el control de Arduino a través de Bluetooth.
Como un módulo Bluetooth se utilizará HC-06 generalizado.
En nuestro proyecto, encenderemos el Bluetooth y apagamos el LED conectado al puerto 13.
Comience con escribir una aplicación en un teléfono inteligente Android. La solicitud se escribirá en un conveniente y simple entorno de programación en el inventor. Los programas se harán en línea.
Siga el enlace http://ai2.appinventor.mit.edu/. Allí se le pedirá que ingrese la cuenta de Google, que tendrá que comenzar si aún no está.
Después de ingresar, se le llevará al programa donde puede crear un proyecto haciendo clic en "Iniciar un nuevo proyecto". Tendrá que ingresar el nombre del proyecto. Llamémoslo led_control.
Abre ventana vacía Aplicaciones.

Aquí seremos colocados. componentes necesarios. Seleccione ListPicker en la ventana izquierda y colóquela en el proyecto.

El componente LISTPICKER en la ventana correcta Encuentre la propiedad de texto, y cambie el "texto para ListPicker1" para "Seleccionar BT-DISPOSITIVO".
Abra la pestaña Diseño en la ventana de la izquierda, coloque el componente HorizontalRangement en la aplicación, cambie su propiedad de ancho para "Llene Padre". Agregue los botones del botón al horizontalRrangement 2, cada uno de ellos, configure la propiedad de ancho en "Fill Padre". Debería trabajar así:

Cambie las firmas en los botones: En la primera, se escribirá por LED encendido, en el segundo LED OFF.

A continuación se agregará la etiqueta y le limpiará el texto.
Queda por agregar un componente que organiza la transmisión de datos sobre Bluetooth. Abra la pestaña Conectividad y coloque el BluetoothClient en el proyecto. Este componente no estará en la pantalla del teléfono, sino debajo de ella, porque Él no es visual.

Ahora puedes comenzar a escribir el programa. En la parte superior derecha del programa, seleccione Modo Bloques.
Aquí habrá un programa de bloques gráficos. A la izquierda, haga clic en el componente ListPicker1 y seleccione ListPicker1.beforepicking.

Haga clic en ListPicker1 nuevamente y seleccione Establecer listaPICKER1.Elements a


Ponlo como en la captura de pantalla.
Esto recibimos una lista de dispositivos Bluetooth conjugados. Ahora conecte al dispositivo seleccionado. Escriba el bloque como en la captura de pantalla a continuación.

El bloque rosado con la inscripción conectada es el primer bloque en la pestaña Texto. Ingrese conectado a una ventana vacía.
Ahora escribe el manejador de botones. Cuando hace clic en el primer botón, se enviará el texto "led_on", y cuando haga clic en el segundo - "LED_OFF". La inscripción en la etiqueta1 también cambiará.

Queda por descargar el proyecto en su teléfono inteligente. Haga clic en Construir y seleccione el método de arranque.

Para la primera opción, necesitará los códigos de Internet y QR. Haga clic y espere la finalización del conjunto del proyecto y la formación del código QR, después de lo cual abra el lector de códigos QR en el teléfono inteligente y lea el código. Solo se descargará e instalará el archivo.
En la segunda versión, el proyecto en formato.apk se guardará en su computadora y puede tirarlo en su teléfono inteligente. de una manera conveniente (por ejemplo, USB).
Ahora nos ocuparemos del programa en Arduino.
La recepción de datos se realiza a través del puerto COM, por lo que usaremos serial. Prevemos previamente las señales, formamos una cadena y compararemos aún más la cadena formada con los comandos LED_ON y LED_OFF.
Arduino.
Cadena val \u003d ""; Configuración de vacío () (Serial.Begin (9600); PinesMode (13, Salida);) Bucle VOID () (Mientras (Serial.Available ()) (// Mientras se encanta C \u003d Serial.Read () viene; // Lea su Val + \u003d C; // y forme un retardo de línea (3);) Si (Val! \u003d "") (Serial.Println (Val);) Si (Val \u003d\u003d "LED_ON") (DigitalWrite (13, Alto);) otra cosa si (val \u003d\u003d "led_off") (DigitalWrite (13, BAJO);) Val \u003d "";)
Cadena val \u003d ""; configuración de vacío () ( De serie. Comenzar (9600); pinMode (13, salida); bucle vacío () ( mientras (serie. Disponible ()) ( // Mientras que los datos vienen char c \u003d serie. leer (); // leerlos val + \u003d c; // y formar una cadena demora (3); } |
Código de carga en Arduino.
Ahora puede conectar el módulo Bluetooth HC-06. Está conectado muy simple:
VCC 5V (puedes 3.3 V)
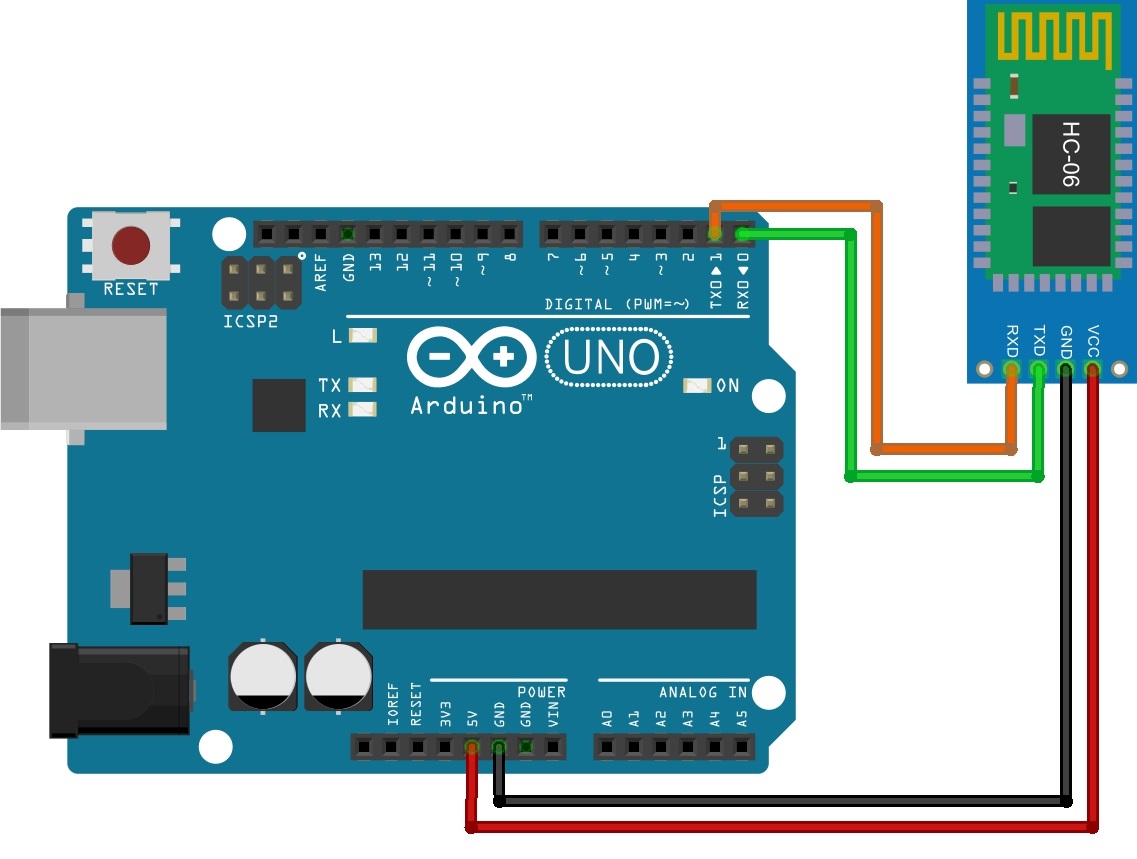
Si intenta descargar el programa en Arduino con un módulo conectado, el error saldrá, porque ¡Y el módulo y la carga del programa usan los puertos RX y TX!
Servir comidas en Arduino. El módulo Bluetooth debe congelar el LED, lo que significa que está esperando la conexión. Tome el teléfono inteligente, busque en la configuración de Bluetooth, enciéndala y comience la búsqueda. Encuentre el dispositivo llamado HC-06 y conecte con él. Desde la primera vez que no funcione. Después de una sola pareja exitosa, puede ejecutar el programa en el teléfono inteligente.
Primero, haga clic en "Seleccionar dispositivo BT" y seleccione el módulo entre los dispositivos conjugados. A continuación, presione los botones ON y OFF del LED. Si todo se hace correctamente, todo funcionará.
Hicimos una aplicación muy simple con usando bluetooth, sin diseño e incluso cheque, nos conectamos al módulo o no. En las siguientes lecciones haremos aplicaciones más complejas y nos familiaricemos con la aplicación Inventor.
Máquina en Arduino y Bluetooth sin editar código. Utilizaremos un software de cortesía especializado para compilar boceto. Además, no es necesario comprar el chasis para nuestra nave, existe prácticamente cualquier modelo o tanque de automóviles controlados por radio defectuoso.
Te sugiero ver un video de revisión sobre una máquina controlada por Bluetooth y su llenado.
Así que vamos a ver el ejemplo vivo cómo hacer que sus propias manos sean manejables de forma remota por Bluetooth C tableta androide O máquina de smartphone. El artículo, lo suficientemente extraño, está diseñado para el nivel inicial de conocimiento. No hay guía para editar el código en Arduino IDE, y lo usaremos solo para llenar nuestro código. Y elaboraremos el algoritmo de control en el programa llamado FLPROG. El programa de gestión del teléfono inteligente es hmikaskada_free. Pero primero sobre la glándula que necesitamos.
Máquina en Arduino y Bluetooth - Hardware.
Lo primero que necesitas es chasis, Es decir, el casco con ruedas y motores, que nos montará la alegría y otros. En mi caso, el caso se usó desde el juguete controlado por radio en el que se quemó la parte POWER. La perspectiva de la reparación me pareció triste, y quería algo nuevo para mis hijos. Así nació este proyecto. Hay dos motores en la carcasa que conducen en el movimiento de la rueda en los lados de la máquina, como un tanque. Todo el relleno electrónico fue a repuestos.
Para administrar los motores eléctricos de nuestra creación futura necesitará. N-Puente en el chip l298NEnlace a Ali, tomé este. Imagen Clickable.
N-puente para arduino
Puede controlar dos motores en el rango de voltaje de 5 a 35 voltios. Admite PWM, es decir, puede ajustar la velocidad de los motores. En la pizarra hay una salida del voltaje estabilizado de 5 voltios para alimentar a Arduino.
Esquema de conexión simple y simple:

La siguiente parte integral del relleno electrónico de nuestro proyecto es módulo Bluetooth HC-06.El módulo más ordinario de Arduino, es tan popular que en la descripción adicional no necesita.

HC-06 Bluetooth para Arduino
El elemento principal y el cerebro en mi caso se situan. arduino nano., Incluso hay una foto para publicar la foto, no conoceré todo sobre ella y saber cómo trabajar con él. Por cierto, cualquier tarifa de Arduino se ajustará, aunque solo se ajuste a los cuerpos.
Las baterías y los cables para la soldadura en la definición no necesitan. La elección de las baterías depende del voltaje de operación de los motores eléctricos.
Máquina en Arduino y Bluetooth - Dibujo de dibujo.
Repito: no habrá excavación en el código aquí. Usaremos programa popular FLPROG. Descargalo Última versión Puedes en el sitio web oficial. La interfaz del programa es simple y simple, pero hay una gran funcionalidad y soporte para casi todos los módulos populares. Cómo usarlo para escribir, porque se detiene en un par de artículos. Solo digo que no he conocido un programa más conveniente y accesible para compilar el zócalo para Arduino y sus clones. Pantalla de interfaz:

Interfaz de FLPROG
En el sitio está lleno de manuales de texto y video, creo que lo resolveremos.
Mi proyecto para una máquina controlada remota se puede descargar desde el disco Yandex.
Máquina en Arduino y Bluetooth: interfaz de gestión en tableta Android.
En numerosas solicitudes escribieron instrucciones detalladas En el desarrollo de la interfaz de gestión de Android Hmikaskada en el artículo. Enlace Klicabelna.
Para dispositivos bajo gestión de Android Hay un programa Hmikaskada (enlace a yandexdisk). Inicialmente, fue diseñado como una alternativa a los costosos paneles de HMI industriales. Pero las mentes inquisitivas reducen rápidamente que puede manejar cualquier cosa. En nuestro caso, la máquina. Apoyos interfaces inalámbricas Wi-Fi y Bluetooth, además, puede conectarse directamente a través de USB.
Hay versiones pagadas y gratuitas del programa. Tengo ambos, pero básicamente hice el proyecto en versión gratuita Qué mostrarle y una vez más para asegurarse de la eficiencia absoluta de la versión gratuita. La principal diferencia está libre de versiones pro. Este es un trabajo solo en Bluetooth.
El Foro FLPROG tiene una rama gigante sobre la compatibilidad con una cascada, y el desarrollador es activo y sociable. No veo la pantalla de los paneles de control, está en el video.
¡No compraremos malos juguetes de los chinos, y compramos un diseñador de chasis barato, varios módulos y ponen las manos!
Eso es lo que hice al final: el chasis, logró - ta-sí !!! - De mi teléfono inteligente en Android.
"Tengo razón, estoy de lado,
Con un turno, y con una trama,
Y de correr, y en su lugar
Y dos piernas juntas ... "
Hoy recogeremos una máquina de escribir divertida con control remoto sobre Bluetooth. Las fuentes del programa de gestión de Android incluyen.
Juguete de muestra decente
Tengo dos hijos, hija e hijo. Ambos en los cumpleaños dan juguetes. Lo que le da a la hija, por regla general, no causa mis reacciones negativas. Y el Hijo, como debería ser, se le da a todo tipo de automóviles, tanques y otras técnicas. De todos estos estilos, no causo quejas solo de juguete, la motosierra, que yo mismo presenté.¿Porqué es eso? Probablemente porque esta sierra se vendió en la tienda de herramientas Stihl. Como supongo, "Stihl" hizo un análogo de juguete de sus productos con una pequeña circulación publicitaria. Como resultado, nació un juguete completamente imputado, muy similar a su hermano mayor. Cadena de goma: giros, porcentaje de 80 controles implementados. Incluso hay un cable con un mango para una planta de sierra, interruptor, botón de gas. Incluye que hay una cadena de repuesto y una herramienta para cambiar la cadena.
Aquí hay un juguete bebiendo
¿De qué estoy hablando? Oh, sí, sobre la arquitectura! Este soy yo que si lo deseas, puedes hacer un juguete excelente. Y hay algo por lo que estar.
¡Construiremos una máquina de escribir con DU!
Interés práctico y técnico causa juguetes con control de radio. Sin embargo, el niño a la edad de 4 a 6 no le dará a los juguetes con el control proporcional "adulto". Lo más probable es que el juguete se romperá, y el dinero se lanza al viento.Como resultado, generalmente le dan algo económico. De todo esto - "barato": una máquina de escribir o mucho rápido o frenos; Los tanques son fríos; Y otras desventajas obvias y ocultas. Y ciertamente ninguna gestión proporcional.
Un día, una de las máquinas dejó de girar la rueda derecha. Desmontado, revisó el motor - bueno.
En la junta de control, tres microcircuitos, China Cholnic, no pudo encontrar la documentación imputada. Un chip es un receptor de señal de radio con salidas lógicas y dos controladores de motor de puentes. Uno de los conductores falló. No funcionó de componentes discretos desde la unidad de puente de componentes discretos.
No había nada adecuado en la tienda local de componentes de radio. Así que llegué a países lejanos para los chips milagrosos. Recolectaron las pertenencias, se rompió los bolsillos, se sirvió una taza de café, lanzó el navegador y se fue ....
Encontré la configuración del controlador del motor, ordenó dos a la vez. En caso de que, de repente, uno será defectuoso o spalle mismo. Luego comenzó a surgir la idea de su máquina de escribir. Después de que el paquete llegó a la gloriosa China, reemplazé con éxito al conductor y la máquina fue reparada.
Sin posponer la idea de mi máquina de escribir en una caja larga, me apoyé nuevamente para seleccionar la Fundación: el chasis de la máquina de escribir futura. El chasis es diferente, para el transporte terrestre: rastreado, con ruedas, con dos, tres, cuatro ruedas, etc.
Como elegí el chasis
Primero, elegí el tipo de transporte en tierra, luego el chasis estará en tierra. El chasis del rastreador suele ser más caro y no demasiado rápido. La rueda de dos tres ruedas me parece débilmente pasable, un chasis de este tipo puede conducir solo en una superficie plana.Me detuve en. En mi opinión, un chasis de este tipo tendrá una excelente permeabilidad y velocidad.

Chasis incluido:
Dos placas de acrílico con un montón de agujeros tecnológicos para sujetar todos los sensores posibles, tableros de control y otros componentes.
4 ruedas
4 Montaje de unidades (motor eléctrico + reductor)
4 discos con ranuras para sensores de velocidad, uno para cada rueda
cierre
Sí, es China de nuevo. Sí, barato. Sí, estoy equivocado de calidad. ¡PERO! Intentaríamos intentarlo. Después de todo, el chasis "adulto" y se mantiene en un adulto, no lo hemos llegado.
Pensamientos y economía de pantanos
Cuando tenga una perspectiva en sus manos, por ejemplo, en términos de kit de cuerpo, el modelo es todo tipo de sensores, servo, etc., comienza a hundirse en el pantano de los pensamientos y el quagmo. Pero, digamos - ¡Detente! Y hazte un mini-tk en el prototipo con breve descripción Todos los nodos.Deberíamos tener un modelo RC de un pasaporte terrestre con el control Bluetooth, con la posibilidad de control inverso y suave de la velocidad de rotación de las ruedas.
¿Qué necesitamos para construir la máquina?
.
Faltan las ruedas giratorias, significa que el control de rotación será como un vehículo de orugas. Es decir, para el movimiento directo, hacia adelante / hacia atrás, el lado derecho e izquierdo de las unidades giran a la misma velocidad. Y para la rotación, la velocidad de rotación en uno de los lados debe ser menor o más.


Para control remoto Máquina utilizando el canal Bluetooth. El módulo "HC-06" es un puente Bluetooth, una interfaz serial que le permite transmitir datos en ambas direcciones. En las señales de entrada - TTL de la interfaz de serie "RXD" y "TXD" para conectarse a un microcontrolador (placa de destino).
Como servirá un control remoto. telefono celular Con Android. ¡Bienvenido a su programa!


Conductor de dos canales, en el par de ruedas izquierda y derecha. El conductor tiene entradas lógicas para cambiar la polaridad de la salida (dirección de rotación) y la entrada de PWM, será posible controlar la velocidad de rotación.

Esta tabla está seleccionada. Fallo en el cajón de la mesa y completamente adecuado para nuestro propósito. Hay entradas / salidas discretas, se muestran las señales del MK "RXD" y "TXD", donde se conectará "HC-06".
Espero decir que el producto Olymex Mod-IO es la fuerza bruta dura. Perfectamente puede ser aplicado y ordinario, ¡qué continuar con la historia!
TOTAL: Chasis + Tablero de control + Módulo Bluetooth + Programa de gestión de Android.
Esquema de conexión total
No es un esquema en forma pura, a saber, el esquema de conexión, ya que toda la Junta estamos listos, y queda por conectarse entre sí.
Esquema en Proteus

Para pintar qué y dónde no me conectaré. Lo más probable es que tenga otro tablero de control. Aplico el código fuente, para que pueda editar el firmware. Bueno, si alguien no puede compilar el firmware bajo su tarifa, comuníquese con: Ayudaré con el tiempo libre.
Programa de microcontrolador
El programa MK puede tomar comandos en una interfaz serial con un módulo Bluetooth.Y, de acuerdo con los comandos, administre el par de unidades a la izquierda y la derecha. Trabajo de control de marcha atrás y velocidad con PWM.
El código está suficientemente comentado. Quiero permanecer por separado en mi implementación del intercambio de datos.
La recepción de datos se implementa a través del tampón de anillo. La cosa no es nueva e implementa muchos.
Las funciones del tampón de anillo se realizan en una biblioteca separada que consiste en:
archivo de cabecera ring_buffer.h. y archivo de archivo de función ring_buffer.s.
Para usar la biblioteca, debe estar conectada en main.c
#include "ring_buffer.h"
A continuación, en el archivo de encabezado, debe configurar la biblioteca. Para configurar, debe especificar solo cuatro directivas:
#Define rx_packet_size 7 // Tamaño del paquete RXD #define buffer_size 16 // El tamaño del búfer de recepción. Debe ser dos veces más rx_packet_size #define start_byte "s" // byte inicial #define stop_byte "e" // tope byte
En realidad no hay nada más para personalizar.
Código de usoEn Main.c, configure el microcontrolador de USART.
Llame a la función de configuración de USART
Usart_init (myuurr);
#Define baud 9600 #define myubrr f_cpu / 16 / baud-1 void usart_init (insigned int Ubrr) (/ * set tasa de baudio * / ubrrrh \u003d (ubrrr \u003e\u003e 8); ubrrl \u003d (char) ubrr; / * habilitar el receptor y transmisor * / UCSRB \u003d (1<< TXCIE) | (1 << RXCIE)| (1 << TXEN) | (1 << RXEN); /* Set frame format: 8data, 2stop bit */ UCSRC = (1 << URSEL) | (0 << USBS) | (3 << UCSZ0); }
Recibir un paquete de datos
En la función de procesador de recepción de USART Byte, solo necesitamos poner el byte aceptado en el tampón de anillo. El análisis de los paquetes se realizará más adelante.Isr (uint8_t data \u003d udr; rb_push_char (datos); // Dobla el byte aceptado en el tampón de anillo)
Sí, todavía estoy descuidado por todo tipo de cheques de grado.
Ahora tenemos tiempo para revisar nuestro búfer de vez en cuando. Para esto, inicié un temporizador en el que instalo la bandera que permite la verificación de búfer de comprobación
Isr (timer0_ovf_vect) (tcnt0 \u003d 0x64; lecturaBuffer \u003d 1;)
En el ciclo principal, agregue una condición para verificar la bandera.
Si (lecturaBuffer) (IF (RB_READ_BUFFER ((uint8_t *) & rxpacket) \u003d\u003d 1) Lectura del búfer (// Desmontamos el paquete, haga algo) lecturaBuffer \u003d 0;)
Función Rb_read_buffer. Comprueba el tampón de anillo Si el tamaño del paquete, el inicio y la parada de bytes están en sus lugares, el paquete se considera válido, la función devuelve "1". Como argumento, la función toma el puntero donde doblar el paquete recibido.
Para mucha confiabilidad, el paquete se puede proporcionar con una suma de comprobación, en uno de sus proyectos comerciales que hice. Es decir, para verificar el tamaño, se agrega el ataque de inicio / parada de byte para verificar la suma de comprobación. Pero hasta ahora lo haremos sin él.
Cómo trato con el paquete
Ahora lo más interesante, ya que trato con el paquete. El paquete puede pasar datos con una dimensión mayor que el byte, los datos icónicos, los datos de puntos flotantes.Explicaré en el ejemplo de un paquete de administración de chasis. Además de iniciar y detener bytes, en su paquete necesito transmitir un comando y dos valores PWM, para el lado izquierdo y derecho de las unidades. Para el equipo, tengo suficiente byte, y por cada valor PWM, paso. int16 - 16 bits, tipo de signo. Es decir, no paso la bandera (byte / signo) direcciones. Para cambiar la dirección, transmito un valor positivo o negativo de PWM.
El paquete receptor está organizado en forma de estructura.
Struct rxpacket (uint8_t startbyte; uint8_t command; int16_t_pwm; int16_t_pwm; uint8_t_t_pwm;) rxpacket;
Llamando a una función Rb_read_buffer ((uint8_t *) & rxpacket), Como argumento, transmitimos un puntero a la estructura del paquete receptor. Es decir, cuando se acepta el paquete, todo se distribuirá en sus estantes en la estructura RXPACKET. Luego, queda por leer estos datos de la estructura, por ejemplo:
Lcmd \u003d rxpacket.command; Llpwm \u003d rxpacket.left_pwm; Lrpwm \u003d rxpacket.right_pwm;
Transferencia de paquetes de datos
Aunque en mi programa, la transmisión aún no se utiliza, sin embargo, se implementa la posibilidad de transmisión. Transmitir datos más fáciles. De manera similar, en cuanto al paquete receptor, cree una estructura:Struct txpacket (uint8_t startbyte; uint8_t rc5system; uint8_t rc5command; uint8_t stopbyte;) txpacket;
Donde, hay un byte de inicio y parada y parte de información. Ya hemos inicializado el receptor de USATT.
Para iniciar la transferencia del paquete - llame a una función
Void send_packet () (// Registre el byte de inicio en el udr udr \u003d start_byte Register;)
En este ejemplo, en esta función, escribo solo el byte de inicio en el registro UDR. Parece que es un poco, pero en la misma función puede implementar la preparación del paquete o algo más útil. Y esto, en mi opinión más lógico. Es lógico en términos de código autocontrol. Es decir, si estoy en el código, simplemente escriba un valor al Registro de UDR, se puede percibir como la transferencia de un solo byte, y llamar a una función de auto-habla send_packet () - Estoy hablando de que envío el paquete de datos.
A continuación, cuando el transmisor de USART enviará todo el byte desde el registro UDR, se llamará el controlador de interrupción de la transmisión.
ISR (char * puntero no firmado \u003d (char * sin firmar *) & (TXPACKET); Carácter no firmado estático Txindex \u003d 1; if (txindex< sizeof(TxPacket))
{
UDR = *(Pointer + TxIndex);
TxIndex++;
}
else TxIndex = 1;
}
En el controlador, declaro una variable de puntero y la asigné a la dirección de la estructura TXPACKET. Siguiente anuncia una variable estática: el índice del byte transmitido, que se asigna al valor al declarar 1 . Comenzamos con uno porque el primer byte de la estructura que ya hemos enviado. En general, en la estructura que puede hacer sin el byte de inicio, todavía lo envié por separado, pero los anuncios de este byte se dejan en la estructura para entender cómo se ve el paquete.
Condición si (txindex< sizeof(TxPacket))
проверяет, что индекс меньше чем размер пакета. Если условие верно, то записываем байт в регистр UDR: UDR = *(Pointer + TxIndex);
incremento txindex. Cuando la USART transmite el siguiente byte, volveremos a entrar en el controlador, pero el siguiente byte de la estructura se pasará de nuevo y se pasarán todos los bytes de estructura. Cuando TXINDEX es mayor que el tamaño de la estructura, la condición no será cierta y caemos en el lo demás TXINDEX \u003d 1; Donde se inicializará TxIndex, pero no se escribe nada en el Registro de UDR, respectivamente, el controlador ya no será causado hasta la siguiente iniciación de la transmisión de paquetes. Por lo tanto, el proceso de transmisión es completamente automático, e incluso si cambiamos la estructura del paquete, el controlador de reescritura no tendrá que ser reescrito.
Como parte de la descripción del programa MK, queda por informar sobre la implementación de la gestión de los conductores. El conductor está controlado por tres señales: A1 (B1), A2 (B2) y PWMA (PWMB). A1 y A2 están diseñados para encender / apagar el controlador y cambiar la polaridad de la salida. La entrada PWMA se atiende por la señal PWM de MK: puede controlar la velocidad de rotación. Para la señal PWM, utilicé dos hardware shim Timer 1.
#Define _wgm13 0 #define _wgm11 0 #define _wgm10 1 // Timer 1 init tccr1a \u003d (1<< COM1A1) | (0 << COM1A0) | (1 << COM1B1) |
(0 << COM1B0) | (_WGM11 << WGM11) | (_WGM10 << WGM10);
TCCR1B = (0 << CS12) | (0 << CS11) | (1 << CS10) |
(_WGM13 << WGM13) | (_WGM12 << WGM12);
TCNT1 =0x0000;
OCR1A = 0;
OCR1B = 0;
El temporizador es de 16 bits, pero PWM está inicializado por 8 bits. Y, como probablemente ya se haya dado cuenta, en el paquete de recepción tengo dos valores para la tarea PWM, para la unidad izquierda y derecha, respectivamente. Variable icónica de 16 bits.
Voy a explicar por qué lo hice.
primeramenteViene del programa bajo Android. El hecho es que Java no tiene tipos icónicos y ya he llegado a estos rastrillos. Y para la transferencia del número de 0 a 255, tendría que estar estallado. Decidí ir más fácilmente enviando un número marcado de 16 bits. Al mismo tiempo, 16 bits de un tipo de signo es de -32786 a 32768, tendremos suficiente.
en segundo lugarAsí que en mi opinión de manera más transparente, la velocidad de rotación y dirección se describe solo por una variable.
Y en tercer lugarCómo no torcer, para nuestros propósitos, menos de tres bytes no se reúnen. Donaré otro byte, pero todo se vuelve claro, el valor positivo de PWM es rotación directa, el valor negativo es la rotación opuesta.
Para gestionar las unidades, escribí una función. unidad (INT LEFTPWM, INT DERECHPWM);.
Drive Void (INT LEFTPWM, INT DEREDPWM) (// Movimiento hacia adelante Rueda izquierda si (LEFTPWM\u003e 0) (Clearbit (A2_PORT, A2_PIN); Setbit (A1_Port, A1_PIN);) // Movimiento hacia atrás Rueda izquierda IF (Leftpwm< 0){
ClearBit(A1_PORT, A1_PIN);
SetBit(A2_PORT, A2_PIN);
}
// Движение ВПЕРЁД правое колесо
if (rightPWM > 0) (Clearbit (B2_Port, B2_Pin); setbit (b1_port, b1_pin);) // Movimiento hacia atrás Rueda derecha IFPWM< 0){
ClearBit(B1_PORT, B1_PIN);
SetBit(B2_PORT, B2_PIN);
}
// Остановка
if (leftPWM == 0){
ClearBit(A1_PORT, A1_PIN);
ClearBit(A2_PORT, A2_PIN);
}
// Остановка
if (rightPWM == 0){
ClearBit(B1_PORT, B1_PIN);
ClearBit(B2_PORT, B2_PIN);
}
set_PWM((uint8_t)(abs(leftPWM)), (uint8_t)(abs(rightPWM)));
}
De acuerdo con el valor PWM, las señales A1 (B1), A2 (B2) se controlan y el valor de la llamada PWM se establece en la función sET_PWM (IZQUIERDO, DUSTRIPWM).
UFF, exhala ...
Resumamos: aceptamos el paquete, desmontado, pasó el valor de PWM a la función manejar..
Aplicación de Android para la máquina
No, así que en detalle, como un programa para MK no me desarmaré. En el desarrollo de Android, también soy un recién llegado y no está listo para contar lo suficiente de manera competente y profundamente.La función principal del programa.- Módulo de transmisión de datos HC-06 a través del canal Bluetooth. El programa tiene una interfaz no intrincada.

Desde arriba, la lista desplegable de dispositivos Bluetooth emparejados para seleccionar el módulo. Al principio, esta lista no fue, pero al final del trabajo en el artículo decidió hacerlo humanamente, porque no todos pueden entender la fuente.

Siguiente botón "OFF": habilita / deshabilita la conexión con "HC-06". Debajo de la izquierda a derecha: el valor transmitido de la PWM del canal izquierdo, el tipo de sensor, el valor del canal derecho. A continuación se muestra el control deslizante de la sensibilidad de la velocidad y el giro.
El programa implementa dos tipos de control de la máquina. Para cambiar el tipo de sensor, debe tocar la inscripción del nombre del sensor: "Inclinación" o "Shack".
1. Control de la máquina con la inclinación del teléfono. La posición cero del teléfono es horizontal. Cuando el teléfono se inclina hacia adelante, el valor PWM aumenta en proporción a la pendiente en el rango de 0 a 255. Cuando el teléfono está inclinado hacia atrás, el valor PWM se reduce en proporción a la pendiente en el rango de 0 a 255

Qué girar a la izquierda o hacia la derecha: debe inclinar el teléfono hacia adelante o hacia atrás y, al mismo tiempo, a la izquierda o hacia la derecha, respectivamente. Sí, como en el auto real, hasta que el soporte no se realice.
2. Toque Gestión. Mi nombre de marca para tal control es "Shack".

Puedes percibir como un panel táctil. Cuando se toca en un cuadrado gris, el valor PWM aumenta / disminuye dependiendo de la ubicación táctil, más se encuentra desde el centro hacia abajo o hasta el mayor / menos valor.
No hay "hermosas" y no temas. Eso es parece ser todo.
Un poco de suerte en los "esquís".
Hay una jamba en mi teléfono. Sí, el teléfono "Ski" - LG G2 Mini. En él, la conexión Bluetooth se instala inadecuada. La conexión se establece normalmente solo si Bluetooth se ha encendido inmediatamente antes de iniciar la aplicación.Hice esto: cuando inicie la aplicación, verifico si Bluetooth está habilitado si está desactivado, hago una solicitud sobre la inclusión. Y cuando "plegable", cerrando la aplicación, apagando la fuerza Bluetooth.
Y un punto más, al cambiar la orientación de la pantalla, Bluetooth se apaga y la solicitud se muestra nuevamente, debe desactivar la conmutación automática de la reversión de la pantalla.
Resumen
¡Creo que llegó a la meta! Con un esfuerzo no muy grande, creé un modelo RC con un control proporcional sano. La máquina puede con entusiasmo para jugar incluso a un adulto, haciendo turnos en el lugar, prescribiendo piruettes complejas, desacelerando y acelerando si es necesario.Y es fácil de solucionarlo durante la descomposición.
Hay un campo para la actividad, hay dónde crecer. Puede "enrollar" el chasis, puede actualizar y mejorar el software para el teléfono.
¡Y esto será continuado!